跳至主要內容
YiguiDing的Blog小站
主页
笔记
前端
后端
算法
电子
源码
理论
工具
投资
随笔
项目
友链
关于
搜索
Ctrl
K
卡尔曼滤波器MPU6050姿态解算:坐标系和旋转矩阵
丁毅桂
2025/1/5
小于 1 分钟
坐标系和旋转矩阵
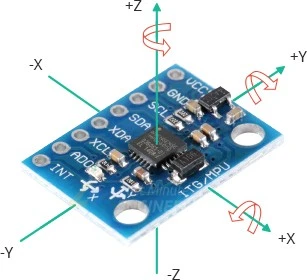
MPU6050的坐标系方向:右手坐标系
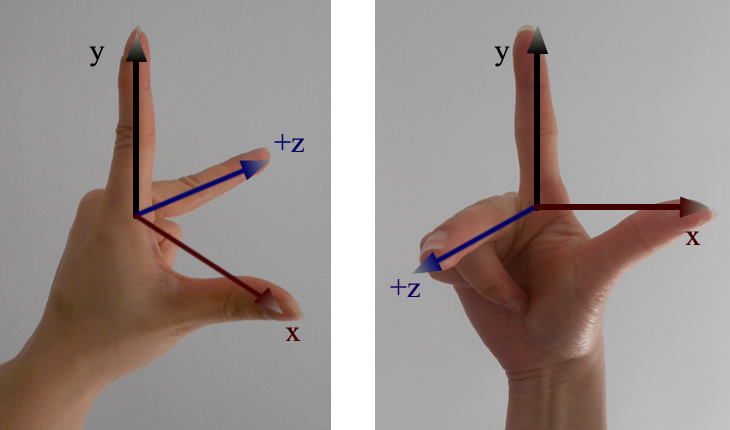
左手坐标系和右手坐标系
二维旋转矩阵